Video
Click on this button to mute or unmute this video or press UP or DOWN buttons to increase or decrease volume level.
¡Última semana del MOOC!
En este módulo exploraremos la programación con dispositivos físicos, comenzando con los robots de suelo y su papel en la enseñanza del pensamiento computacional. Conoceremos su origen y su evolución hasta los modelos actuales, además de aprender a diseñar actividades inclusivas.
También descubriremos algunas de las muchas placas de programación educativas para alumnado mayor y sus principales características.
Para cerrar el MOOC, pondrás en práctica lo aprendido con una actividad final usando alguna de las herramientas vistas en los últimos módulos.
En este módulo nos enfocaremos en los siguientes objetivos:
-
- Descubrir la evolución y aplicaciones de los robots de suelo.
- Conocer algunos de los robots de suelo usados actualmente..
- Conocer algunas placas de programación educativa y sus principales características.
- Diseñar una actividad para utilizar alguna de las herramientas indicadas en el MOOC.
1. ROBOTS DE SUELO
Los robots de suelo son dispositivos diseñados para ayudar a los niños y niñas a aprender de manera práctica conceptos relacionados con el pensamiento computacional y la programación. Funcionan desplazándose sobre una alfombrilla o tapete diseñado con intención didáctica o sobre el suelo, siguiendo las instrucciones que el alumnado les proporciona.
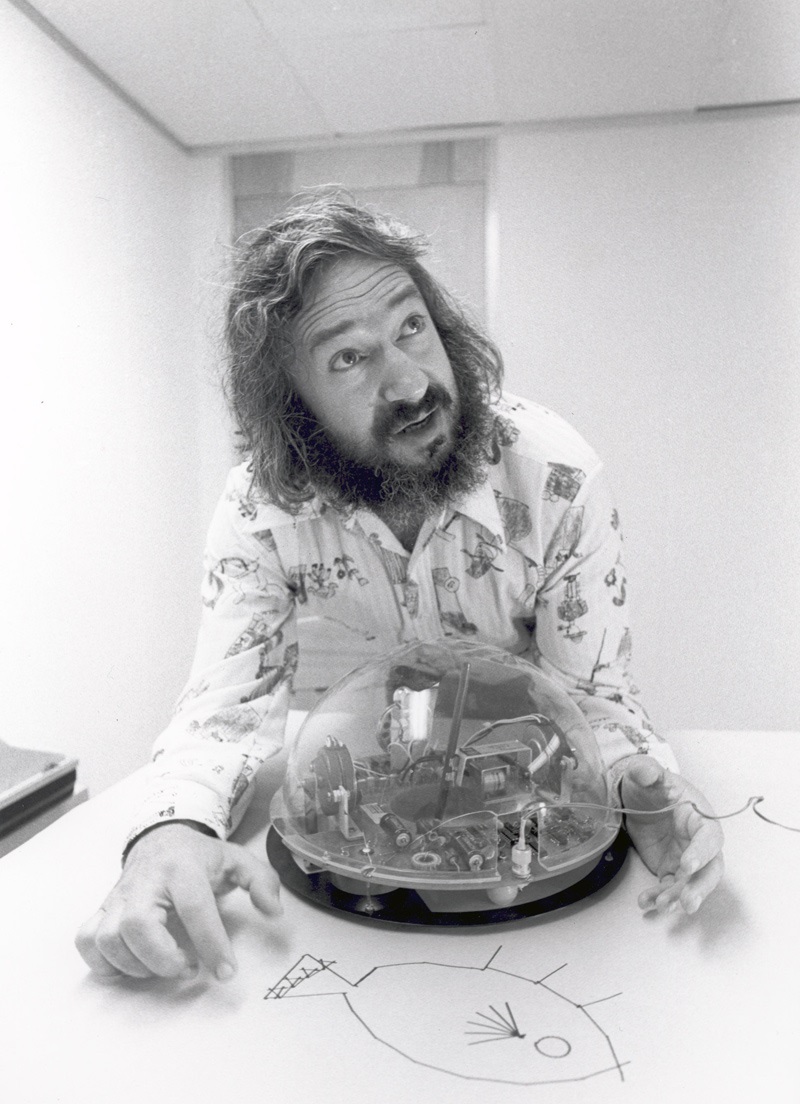
La historia de los robots de suelo educativos comienza en 1967, cuando Seymour Papert y su equipo desarrollaron el lenguaje de programación LOGO y su tortuga en el MIT. Este fue el primer robot de suelo diseñado con fines didácticos. La primera versión de la tortuga se controlaba mediante comandos desde un ordenador.
Los robots de suelo actuales han ido incorporando nuevas funcionalidades gracias a los avances tecnológicos, pero su esencia educativa sigue siendo la misma que Seymour Papert promovió con LOGO: fomentar el aprendizaje práctico desde un enfoque construccionista.
Seymour Papert presentando Logo![]() , del canal de YouTubeINTEF
, del canal de YouTubeINTEF![]() , bajo licencia YouTube Estandar
, bajo licencia YouTube Estandar![]()
1.1. VENTAJAS DEL USO DE ROBOTS DE SUELO
Los robots educativos de suelo son herramientas muy versátiles en el aula. Uno de los principales beneficios es su aportación al desarrollo del pensamiento computacional, ya que incluso los más sencillos permiten al alumnado descomponer problemas en pasos y crear secuencias lógicas para resolverlos, mejorando su capacidad resolución de problemas.
Además, promueven un aprendizaje activo, permitiendo al alumnado interactuar directamente con el dispositivo.
Otro aspecto importante a considerar es el desarrollo del trabajo en equipo y las habilidades sociales. Dado que las actividades con robots de suelo suelen realizarse en grupo, el precio de estos dispositivos dificulta que cada estudiante tenga acceso individual a un robot. Sin embargo, esta limitación favorece la colaboración, ya que compartir un único dispositivo fomenta la cooperación, la comunicación, la capacidad de negociación y la toma conjunta de decisiones.
Los robots de suelo y las actividades que podemos desarrollar con ellos son bastante adaptables: pueden utilizarse en diferentes niveles educativos, desde infantil hasta primaria, adaptándose a las necesidades y capacidades de cada etapa mediante las actividades en las que se emplean. También se pueden integrar en diversas asignaturas, ya que, al ser herramientas, su impacto depende de la calidad de las actividades diseñadas para su uso.
Por último, y no por ello menos importante, es necesario destacar que el uso de este tipo de dispositivos suele ser recibido con entusiasmo por el alumnado, creando un clima de interés que facilita su atención.
1.2.1. BEEBOT
Beebot es un pequeño robot educativo con forma de abeja. Durante muchos años, ha sido una de las opciones favoritas del profesorado, por lo que es fácil encontrar mucha información y actividades creadas para su uso.
Se programa mediante una botonera que tiene en la parte superior de la carcasa, pudiendo almacenar hasta 250 instrucciones o movimientos.


Las flechas que indican arriba y abajo dan la instrucción de avanzar o retroceder. Las de girar, hacen que gire 90º a derecha o izquierda. Es importante tener en cuenta que en estos casos el robot gira sobre su eje, es decir, solo rota, no avanza a la siguiente casilla. También cuenta con un botón de pausa que hace que se pare unos momentos antes de continuar su secuencia de movimientos. El último botón, el de la X, sirve para borrar la secuencia introducida.
Beebot almacena instrucciones nuevas incluso después de haberse movido, por lo que para iniciar una nueva secuencia es necesario presionar este botón de borrado. En caso contrario, los nuevos movimientos que programemos se añadirán a la secuencia anterior. En las nuevas versiones permite grabar audios al pulsar cada tecla. Se carga mediante un cable USB, pero también cuenta con una estación de carga para cargar seis robots a la vez.
En la siguiente lista del canal de Programo Ergo Sum![]() podemos encontrar algunos vídeos sobre el manejo de este dispositivo.
podemos encontrar algunos vídeos sobre el manejo de este dispositivo.
Robótica Educativa con Bee-Bot![]() , del canal de YouTube Programo Ergo Sum
, del canal de YouTube Programo Ergo Sum![]() , bajo licencia YouTube Estandar
, bajo licencia YouTube Estandar![]()
Hay una versión de este robot llamada Bluebot. Es similar a Beebot, pero este incluye bluetooth y se puede programar desde dispositivos móviles mediante una app o desde un dispositivo físico en el que se colocan fichas que indican los movimientos. La carcasa de este modelo es transparente, lo que permite ver el interior del robot.
Bee Bot VS Blue Bot: Conoce las diferencia entre estos robots educativos![]() , del canal de YouTube Tibot Robótica Educativa
, del canal de YouTube Tibot Robótica Educativa![]() , bajo licencia YouTube Estandar
, bajo licencia YouTube Estandar![]()
También podemos encontrar emuladores para poder replicar el uso de Beebot de forma virtual.
Bee-Bot Online Emulator![]() ofrece diferentes alfombrillas para jugar con una Beebot virtual que se programa desde una botonera como la del robot original. Una ventaja con la que cuenta es que la secuencia programada aparece bajo la botonera, facilitando la tarea al alumnado.
ofrece diferentes alfombrillas para jugar con una Beebot virtual que se programa desde una botonera como la del robot original. Una ventaja con la que cuenta es que la secuencia programada aparece bajo la botonera, facilitando la tarea al alumnado.
Para dispositivos móviles también tenemos la app Bee-bot![]() , que consta de diferentes escenarios en los que se proponen diversos recorridos y retos de distinta dificultad.
, que consta de diferentes escenarios en los que se proponen diversos recorridos y retos de distinta dificultad.
1.2.2. RATÓN ROBOT CODE & GO
Este robot es muy parecido al Beebot, pero el animal que representa es un ratón. Es de menor tamaño y en cada movimiento se desplaza 10 cm en lugar de los 15 cm que se recorre Beebot, lo que facilita la creación de alfombrillas al optimizar el espacio.
En este caso, las teclas para programarlo tienen diferentes colores, lo que facilita la programación al permitir asociar cada movimiento con un color específico.
Tiene material adicional, como tarjetas de programación con flechas, para preparar la secuencia antes de programar el robot, baldosas de plástico para crear recorridos, túneles, vallas, tarjetas con retos…
Introduce Your Child to Coding with the Robot Mouse![]() , del canal de YouTube Learning Resources
, del canal de YouTube Learning Resources![]() , bajo licencia YouTube Estandar
, bajo licencia YouTube Estandar![]()
1.2.3. SUPER-DOC
Otro robot similar es el Super-Doc. También programa mediante una botonera secuencias de movimientos para desplazarse por alfombrillas. Además, este robot viene con una serie de recursos incluidos: cartas de juego, alfombrilla dos caras, fichas de dirección de doble cara, disfraces para crear personajes y una guía de actividades.
En este caso, el robot también se desplaza por casillas de 15 cm.
Para introducir las instrucciones y controlar el robot, la botonera tiene nueve pulsadores:
-
- Flecha adelante: avanza una casilla.
- Flecha izquierda: gira 90º a la izquierda.
- Flecha atrás: retrocede una casilla.
- Flecha derecha: gira 90º a la derecha.
- Botón OK: inicia la secuencia programada.
- Botón pausa/repetir: pausa un segundo o repite una petición.
- Botón personaje: selecciona el personaje con el que se quiere jugar.
- Botón estrella: memoriza la función de recoger objetos (en modo 2).
- Botón papelera: borra los movimientos programados.
En la guía vienen explicados dos modos de juego:
-
- Modo 1: el modo básico, en el que el robot actúa como los robots de suelo vistos anteriormente. El alumnado programa los movimientos para llegar a las casillas deseadas de la alfombrilla que se esté usando. Las cartas y fichas de dirección pueden ayudar a planificar y secuenciar los movimientos antes de programar el robot.
- Modo 2: en este modo avanzado, Super-Doc puede reconocer su posición en el tablero y reaccionar a las acciones del alumnado. El robot indica a objetivos debe dirigirse y comprueba si los movimientos ejecutados son correctos. Si se comete un error, Super-Doc da por no superada la misión y solicita volver a la casilla inicial para empezar de nuevo.
DOC, robot educativo![]() , del canal de YouTube David Rodríguez Vila
, del canal de YouTube David Rodríguez Vila![]() , bajo licencia YouTube Estandar
, bajo licencia YouTube Estandar![]()
1.2.4. MATATASTUDIO CODING SET
Matatastudio Coding Set es un pequeño robot cilíndrico con un sensor que recibe las instrucciones programadas la consola, otro dispositivo físico con forma de “torre de control” que funciona como un cuadro de mando. Esta consola tiene una cuadrícula donde se colocan piezas de plástico que representan diferentes instrucciones: avanzar, girar, bucles…. Cada bloque tiene un símbolo característico que permite reconocerlo fácilmente.
Para programar el robot, el alumnado coloca estos bloques en la consola en el orden deseado y, una vez lista la secuencia, presionan un botón en la consola para que las instrucciones se transmitan al robot mediante una conexión inalámbrica. El receptor se desplaza entonces por la alfombrilla siguiendo el camino programado.
How does it work Coding set?![]() , del canal de YouTube MatataStudio
, del canal de YouTube MatataStudio![]() , bajo licencia YouTube Estandar
, bajo licencia YouTube Estandar![]()
1.2.5. TALE-BOT
Tale-Bot es otro robot educativo que sigue el mismo modo de funcionamiento y programación mediante una botonera con los siguientes pulsadores:
Pulsadores (botones básicos de movimiento):
-
- Avanzar: mueve al robot hacia adelante.
- Retroceder: mueve al robot hacia atrás.
- Giro a la izquierda: gira el robot 90° hacia la izquierda.
- Giro a la derecha: gira el robot 90° hacia la derecha.
- Botón de borrado: manteniéndolo presionado durante más de un segundo, elimina todas las instrucciones programadas. Presionándolo menos de un segundo, borra solo la última.
- Botón de baile aleatorio: el robot ejecuta una secuencia de movimientos y sonidos.
- Botón de grabación: con una pulsación larga, permite grabar hasta treinta segundos de audio. Con una pulsación corta, incorpora esta grabación a la programación.
- Botón de bucle: configura la cantidad de repeticiones para las instrucciones dadas.
Este robot se puede configurar fácilmente para que mueva 10 o 15 cm y cambiar el idioma para el modo de juego interactivo.
Introducing Matatalab Tale-Bot Pro Hands-on Coding Robot Set Education Edition for Age 3-5![]() , del canal de YouTube MatataStudio
, del canal de YouTube MatataStudio![]() , bajo licencia YouTube Estandar
, bajo licencia YouTube Estandar![]()
Tale-Bot cuenta con variados recursos y accesorios, como alas y brazos para acoplar al robot, unas de ellas compatibles con bloques de construcción LEGO, cartas de programación, alfombrillas interactivas, rotuladores borrables para acoplar en uno de los modelos de alas…
Al igual que Super-Doc, Tale-Bot tiene dos modos de funcionamiento. En el modo de programación básica, funciona como un robot educativo clásico, en el que el alumnado programa una secuencia de movimientos para que el robot se desplace por las casillas del tapete. En el modo interactivo, Tale-Bot puede reconocer su posición dentro de la alfombrilla interactiva que se esté utilizando y reaccionar en función de los movimientos realizados, indicando si los movimientos son correctos o si se ha cometido algún error. Si el robot no alcanza el objetivo, pide que se lleve a la última casilla correcta para corregir la secuencia y volver a intentarlo.
1.2.6. ESCORNABOT
Escornabot![]() , a diferencia de los anteriores dispositivos, no es solo un robot, es un proyecto de código/hardware abierto. Se trata de un robot DIY (Do it yourself) que, a pesar de poderse comprar totalmente montado, es habitual hacerlo a partir de un kit o desde cero.
, a diferencia de los anteriores dispositivos, no es solo un robot, es un proyecto de código/hardware abierto. Se trata de un robot DIY (Do it yourself) que, a pesar de poderse comprar totalmente montado, es habitual hacerlo a partir de un kit o desde cero.
Tiene una fuerte comunidad alrededor dispuesta a ayudar, pero no es un robot comercial para el que exista un servicio técnico o de asesoramiento, por lo que es una opción interesante, pero solo recomendada a personas con ganas de aprender y de involucrarse. A veces cuesta dar con el fallo que hace que tu escornabot no funcione, pero cuando lo tienes en marcha es muy gratificante, porque probablemente hayas visto el dispositivo desde que no era más que un montón de componentes sueltos.
Hay muchos tipos de escornabots, porque al ser un robot modular, personalizable y de código abierto, puede ensamblarse y modificarse según las necesidades de cada persona.
|
Briboi audacious |

Briboi compactus |
Singularis 2.12 XDeSIG |


El escornabot básico puede programarse con los botones para ejecutar secuencias de movimientos como los robots anteriores. Los modelos Briboi y Singularis están diseñados para moverse 10 cm, pero se puede modificar para que avance la distancia que quieras y que rote los grados que necesites en los giros. De hecho, con la configuración básica se puede alternar entre giros de 90º y giros de 45º para poder moverse por las diagonales de una cuadrícula.
La comunidad escornabot ha ideado y diseñado diferentes formas de programar los escornabots para distintas necesidades, por ejemplo, mediante una app para Android![]() conectada mediante bluetooth, mediante una app para Android
conectada mediante bluetooth, mediante una app para Android![]() que lee códigos de barras en bloques físicos o mediante tarjetas RFID
que lee códigos de barras en bloques físicos o mediante tarjetas RFID![]() . ¡Incluso mediante pulsadores gigantes
. ¡Incluso mediante pulsadores gigantes![]() controlados por una placa Echidna para personas con problemas de motricidad!
controlados por una placa Echidna para personas con problemas de motricidad!
La comunidad ha sido muy prolífica, y en este repositorio![]() puedes encontrar muchísimas actividades y alfombrillas para trabajar temas muy diversos en el aula. Si quieres diseñar y compartir las tuyas, puedes hacerlo mediante este enlace
puedes encontrar muchísimas actividades y alfombrillas para trabajar temas muy diversos en el aula. Si quieres diseñar y compartir las tuyas, puedes hacerlo mediante este enlace![]() .
.
1.3. CÓMO HACER ACTIVIDADES MÁS INCLUSIVAS CON ROBOTS DE SUELO
Para hacer las actividades con robots de suelo más inclusivas, debemos recordar lo comentado en el primer módulo. Es esencial revisar nuestros propios sesgos y aumentar la exposición a referentes femeninos.
Además, se deben seleccionar contenidos que no refuercen estereotipos de género, fomentando desafíos abiertos y relacionados con problemas reales. Promover equipos diversos en género, habilidades y experiencias facilita la colaboración y asegura que todas las voces sean valoradas.
También es importante utilizar un lenguaje inclusivo, reforzar logros de manera equitativa y contextualizar los desafíos para que sean accesibles y relevantes para todo el alumnado. Finalmente, vincular las actividades con referentes diversos muestra que estas disciplinas son para todas las personas, sin importar el género.
También podemos inspirarnos en las actividades desenchufadas presentadas en el módulo 2, ya que algunas pueden ser fácilmente adaptadas para el uso de este tipo de robots.
Por último, se listan algunos consejos que se pueden tener en cuenta a la hora de diseñar actividades:
-
- Diseña retos atractivos y significativos. Plantea actividades que conecten con el día a día del alumnado o con problemáticas sociales relevantes, como el cuidado del medio ambiente, la organización de un evento o la resolución de conflictos en el aula. Esto permitirá que el alumnado sienta que su trabajo tiene un propósito y fomente el interés por la actividad independientemente de su género.
- Incluye narrativas y roles diversos. Introducir historias que contextualicen los retos propuestos puede enriquecer la experiencia. Por ejemplo, en lugar de simplemente pedir al robot que llegue de un punto a otro, crea un escenario donde el robot deba ayudar a un personaje (que puede ser una profesional femenina) a superar un desafío, como entregar medicamentos a una aldea o recuperar un objeto valioso. Esto ayuda a normalizar la presencia de roles femeninos en contextos STEAM.
- Promueve la personalización y creatividad. Permite que el alumnado decore o adapte los robots de suelo, incorporando elementos como disfraces o accesorios, lo que facilita la identificación con la actividad y fomenta la expresión artística, incluyendo la de STEAM. Cuida que las opciones de personalización no estén condicionadas por estereotipos de género.
- Introduce mecánicas de colaboración en las actividades, en las que el éxito dependa del trabajo en equipo, como programar el robot para realizar tareas conjuntas o completar un recorrido en etapas asignadas a diferentes miembros del grupo. Asegúrate de que cada integrante tenga un papel clave y que estos roles roten para que todo el mundo participe equitativamente.
- Reflexiona sobre los resultados al final de cada actividad, facilitando un espacio para pensar sobre la experiencia y lo aprendido. Utiliza este momento para reforzar valores de inclusión y diversidad, subrayando que todas las contribuciones son valiosas y necesarias.
- Evalúa desde una perspectiva inclusiva. Diseña criterios de evaluación que valoren no solo los resultados finales, sino también el proceso, la colaboración, la creatividad y el esfuerzo. Evita recompensar actitudes competitivas o individuales por encima de los logros colectivos, y celebra los avances de todo el grupo de forma equitativa.
2. PLACAS DE ROBÓTICA EDUCATIVA
Existen numerosas placas de robótica educativa, cada una con características particulares que proporcionan distintas posibilidades a la hora de utilizarlas en el aula con diferentes niveles educativos.
A continuación, se presentarán algunas de las más utilizadas, destacando sus principales funcionalidades y herramientas para programarlas. Sin embargo, es importante tener en cuenta que este módulo solo pretende proporcionar una introducción básica a cada una. Para aprender a utilizarlas, y más de manera efectiva, será necesario profundizar a través de otros cursos, tutoriales, manuales específicos o recursos adicionales.
El objetivo de este módulo es ofrecer una pincelada inicial para que, si alguna placa despierta tu interés, puedas investigar más para aprender a utilizarla y cómo desarrollar proyectos con ella en el aula.
2.1. ARDUINO
Arduino![]() es una plataforma de hardware y software libre creada en 2005 con el objetivo de facilitar el aprendizaje de la programación de hardware y la creación de prototipos.
es una plataforma de hardware y software libre creada en 2005 con el objetivo de facilitar el aprendizaje de la programación de hardware y la creación de prototipos.
Las placas de Arduino son de las más utilizadas en educación. Es fácil encontrarlas en los institutos, y por llevar tanto tiempo en el ámbito educativo, hay muchísima documentación y actividades que tienen esta placa como elemento central.
El modelo más popular es el Arduino UNO R.3, aunque recientemente ha sido sustituido por el modelo Arduino UNO R.4.
|
Arduino-uno |
|


Las placas Arduino se utilizan habitualmente en Educación Secundaria, puesto que es necesario añadirles componentes externos para realizar los montajes, y el cableado de estos puede ser complicado. Para ello se suelen utilizar placas de prototipado (breadboards) que tienen agujeritos donde conectar cables y componentes para formar los circuitos.
Es necesario contar, además de con la placa, con diferentes sensores y actuadores para poder montar dichos circuitos.

Programando placas Arduino
Estas placas pueden programarse mediante diferentes herramientas adaptadas a diferentes niveles de dificultad. Entre las más utilizadas podemos encontrar entornos visuales de programación por bloques y el entorno de desarrollo de Arduino, para programar mediante texto.
IDE Arduino
El entorno de desarrollo de Arduino es la opción más avanzada, recomendable solo para Secundaria. El programa se puede descargar desde la página oficial de Arduino![]() , aunque también podemos utilizar la versión on line
, aunque también podemos utilizar la versión on line![]() .
.
Existen numerosos cursos y tutoriales para trabajar con el IDE de Arduino, como por ejemplo el CURSO ARDUINO CON CÓDIGO![]() , de CATEDU
, de CATEDU![]() , en el que puedes aprender cómo se trabaja con la placa Arduino y con diferentes sensores y actuadores.
, en el que puedes aprender cómo se trabaja con la placa Arduino y con diferentes sensores y actuadores.

Arduino (2024) Arduino IDE![]() [Aplicación web]
[Aplicación web]
Arduino blocks
Arduino blocks![]() es una herramienta creada por Juanjo López
es una herramienta creada por Juanjo López![]() que facilita la programación de Arduino para el alumnado de Primaria y primeros cursos de Secundaria, ya que permite programar las placas sin necesidad de escribir el código. En su lugar, la programación se realiza gracias a una serie de bloques que se unen o anidan unos dentro de otros de manera similar a los proyectos de Scratch.
que facilita la programación de Arduino para el alumnado de Primaria y primeros cursos de Secundaria, ya que permite programar las placas sin necesidad de escribir el código. En su lugar, la programación se realiza gracias a una serie de bloques que se unen o anidan unos dentro de otros de manera similar a los proyectos de Scratch.
En la propia web de Arduino blocks podemos encontrar documentación y manuales![]() del programa, así como un buscador de proyectos
del programa, así como un buscador de proyectos![]() .
.

Juan José López Almendros![]() (2024) Arduino blocks
(2024) Arduino blocks![]() [Aplicación web]
[Aplicación web]
Snap4Arduino
Snap4Arduino![]() es otro entorno de programación por bloques para programar placas Arduino, en este caso basado en el entorno de programación Snap!
es otro entorno de programación por bloques para programar placas Arduino, en este caso basado en el entorno de programación Snap!![]() . Actualmente está desarrollado por Joan Guillén
. Actualmente está desarrollado por Joan Guillén![]() y Bernat Romagosa
y Bernat Romagosa![]() . También cuenta con una versión para trabajar on line
. También cuenta con una versión para trabajar on line![]() .
.
Si quieres aprender cómo utilizar esta herramienta, puedes acceder a la sección Recursos y Prácticas de Snap4arduino![]() de la web del IES Murillo de Sevilla, donde encontrarás diferentes prácticas propuestas por José Pujol
de la web del IES Murillo de Sevilla, donde encontrarás diferentes prácticas propuestas por José Pujol![]() .
.

Joan Guillén![]() y Bernat Romagosa
y Bernat Romagosa![]() (2024) Snap4Arduinos
(2024) Snap4Arduinos![]() [Aplicación web]
[Aplicación web]
2.2. MICRO:BIT
Micro:bit![]() es una placa de desarrollo creada por la BBC para fomentar el aprendizaje de la programación y la robótica en estudiantes de Primaria y Secundaria.
es una placa de desarrollo creada por la BBC para fomentar el aprendizaje de la programación y la robótica en estudiantes de Primaria y Secundaria.
La placa Micro:bit incorpora varios sensores y actuadores, por lo que se puede empezar a trabajar con ella sin necesidad de añadir componentes externos.

Micro-bit v1 & v2![]() , por Crash48
, por Crash48![]() , bajo licencia CC0 1.0
, bajo licencia CC0 1.0![]()
La última versión de la placa Micro:bit cuenta con los siguientes sensores y actuadores:
-
- Matriz de 25 LED.
- 2 pulsadores.
- Acelerómetro.
- Sensor de temperatura.
- Sensor de luz.
- Brújula.
- Zumbador.
- Micrófono.
- Radio (para conectarse con otras placas Micro:bit)
Además, tiene pines de conexión para conectar elementos externos. La placa Micro:bit es una de las más populares, lo cual ha favorecido que existan múltiples kits de extensión para facilitar la conexión de estos elementos externos.
En la web![]() puedes encontrar muchos proyectos, tutoriales e información detallada sobre la placa.
puedes encontrar muchos proyectos, tutoriales e información detallada sobre la placa.
Programando Micro:bit
Micro:bit puede programarse mediante diversas plataformas adaptadas a diferentes niveles.
MakeCode
MakeCode![]() es el entorno de programación por bloques propio de la placa. El alumnado puede programarla arrastrando y soltando bloques, de un modo similar a como se hace en Scratch.
es el entorno de programación por bloques propio de la placa. El alumnado puede programarla arrastrando y soltando bloques, de un modo similar a como se hace en Scratch.

Microsoft (2024) MakeCode![]() [Aplicación web]
[Aplicación web]
Una característica muy útil de MakeCode es que incorpora un simulador en el que se representa, de forma virtual, el programa que estamos desarrollando. De este modo podemos saber si funciona tal y como queremos antes de cargarlo en la placa, además de poder usarse para trabajar sin la misma.
Scratch
También se pueden usar las placas Micro:bit desde Scratch![]() , integrándola en proyectos para hacerlos más interactivos. Para hacerlo es necesario cargar un programa especial en la placa para que se comunique con el ordenador, y tener instalado el Scratch Link
, integrándola en proyectos para hacerlos más interactivos. Para hacerlo es necesario cargar un programa especial en la placa para que se comunique con el ordenador, y tener instalado el Scratch Link![]() (solo disponible para Windows y Mac). Además, el ordenador debe tener conexión bluetooth.
(solo disponible para Windows y Mac). Además, el ordenador debe tener conexión bluetooth.

Fundación Scratch![]() (2024). Scratch
(2024). Scratch![]() [Aplicación web]
[Aplicación web]
2.3. MAKEY MAKEY
Makey Makey![]() es una placa que permite transformar objetos cotidianos en pulsadores capaces de controlar un ordenador. Fue desarrollada por Jay Silver
es una placa que permite transformar objetos cotidianos en pulsadores capaces de controlar un ordenador. Fue desarrollada por Jay Silver![]() y Eric Rosenbaum
y Eric Rosenbaum![]() en el Medialb del MIT.
en el Medialb del MIT.
A diferencia de las placas anteriormente mencionadas, Arduino y Micro:bit, Makey Makey no necesita programación previa: funciona directamente al conectarse mediante un puerto USB como un teclado, un ratón o cualquier otro periférico. Una vez conectada, cualquier cosa que conduzca mínimamente la electricidad puede convertirse en un pulsador, permitiendo controlar juegos, aplicaciones… o incluso escribir como un teclado.

MaKey MaKey Kit Photo on Grey![]() , por jayahimsa
, por jayahimsa![]() , bajo licencia CC BY
, bajo licencia CC BY![]()
Aunque Makey Makey no necesita programación para funcionar, se puede combinar con entornos de programación como Scratch para explorar nuevas ideas y pensar nuevos modos de controlar nuestros proyectos de forma creativa.
Scratch cuenta con bloques específicos para trabajar con la placa Makey Makey, pero puesto que sus conectores son detectados como teclas del teclado, se puede usar directamente en los proyectos con los bloques de pulsar la tecla correspondiente a sus conectores.
En la web puedes encontrar un curso![]() y diversos ejemplos de actividades
y diversos ejemplos de actividades![]() para usar Makey Makey.
para usar Makey Makey.
2.4. ECHIDNA
Echidna Educación![]() es un proyecto de hardware y software libre para facilitar el aprendizaje de la programación de sistemas físicos en Primaria y Secundaria. Tiene dos tipos de placas diseñadas por Xabier Rosas, profesor de Ciclos Formativos; Jose Pujol, profesor de Secundaria; y Jorge Lobo, maestro de Primaria, a partir de las experiencias y necesidades detectadas en sus aulas.
es un proyecto de hardware y software libre para facilitar el aprendizaje de la programación de sistemas físicos en Primaria y Secundaria. Tiene dos tipos de placas diseñadas por Xabier Rosas, profesor de Ciclos Formativos; Jose Pujol, profesor de Secundaria; y Jorge Lobo, maestro de Primaria, a partir de las experiencias y necesidades detectadas en sus aulas.
La primera, Echidna Shield![]() , es un escudo para Arduino, es decir, una placa con sensores y actuadores que se acopla a un Arduino. La segunda, Echidna Black
, es un escudo para Arduino, es decir, una placa con sensores y actuadores que se acopla a un Arduino. La segunda, Echidna Black![]() , es una placa autónoma, no se necesita Arduino, e incorpora algunos sensores más que la Echidna Shield.
, es una placa autónoma, no se necesita Arduino, e incorpora algunos sensores más que la Echidna Shield.
Ambas placas incluyen un modo MkMk para usar 8 conectores transformar objetos cotidianos en pulsadores como la placa Makey Makey.

Esquema de componentes Echidna Shield![]() , por Echidna Educación
, por Echidna Educación![]() , bajo licencia CC-BY-SA
, bajo licencia CC-BY-SA![]()

Esquema de componentes Echidna Black![]() , por Echidna Educación
, por Echidna Educación![]() , bajo licencia CC-BY-SA
, bajo licencia CC-BY-SA![]()
En la web del proyecto se puede encontrar mucha información sobre las placas y su uso didáctico como, por ejemplo actividades para Primaria![]() , actividades para Secundaria con entornos gráficos
, actividades para Secundaria con entornos gráficos![]() , actividades para Secundaria con IDE de Arduino
, actividades para Secundaria con IDE de Arduino![]() , y muchas otras actividades desarrolladas en talleres
, y muchas otras actividades desarrolladas en talleres![]() o explicadas en su blog
o explicadas en su blog![]() .
.
Programando placas Echidna
Al igual que las placas Arduino, las placas Echidna se pueden programar con IDE de Arduino![]() , y su versión on line
, y su versión on line![]() , Arduino blocks
, Arduino blocks![]() o Snap4Arduino
o Snap4Arduino![]() , que además cuenta con una extensión de bloques específicos para Echidna.
, que además cuenta con una extensión de bloques específicos para Echidna.
EchidnaML
Además, Echidna Educación tiene un software específico basado en Scratch: EchidnaML![]() , desarrollado por Juan David Rodríguez
, desarrollado por Juan David Rodríguez![]() .
.
Este software incluye bloques específicos para estas placas y que incluye LearningML![]() , permitiendo integrar de esta forma la Programación, la Robótica y la Inteligencia Artificial en un mismo proyecto de forma sencilla.
, permitiendo integrar de esta forma la Programación, la Robótica y la Inteligencia Artificial en un mismo proyecto de forma sencilla.

Echidna Educación![]() (2024). EchidnaML
(2024). EchidnaML![]() [Aplicación de escritorio]
[Aplicación de escritorio]
RETO
El objetivo de esta actividad obligatoria es diseñar una actividad usando alguna de las herramientas presentadas a lo largo del MOOC (ScratchJR, Scratch, LearningML, algún robot de suelo o alguna placa educativa) que ayude al alumnado a comprender y desarrollar el pensamiento computacional. La actividad debe trabajar la igualdad de género y puede estar contextualizada dentro de una o varias áreas del currículo.
Para desarrollar la actividad:
-
- Diseña un título atractivo para la actividad conectada.
- Especifica el nivel educativo y las edades a las que está dirigida.
- Indica claramente el objetivo u objetivos que pretende trabajar.
- Describe en resumen en qué consiste la actividad.
- Explica el desarrollo de la actividad paso a paso.
- Incluye un listado de los recursos necesarios para llevarla a cabo.
- Añade anexos si necesitas material específico que has creado para tu actividad.
Para crear tu reto y compartirlo (no olvides que debes hacerlo mediante una URL pública) puedes utilizar alguna de las herramientas que te ofrecemos al principio del curso en el apartado de recursos.
La siguiente rúbrica![]() te orientará a la hora de realizar el reto y te ayudará a evaluar los trabajos de tus compañeros y compañeras. Es importante que la tengas presente para saber qué criterios de evaluación debes considerar a la hora de realizar el reto.
te orientará a la hora de realizar el reto y te ayudará a evaluar los trabajos de tus compañeros y compañeras. Es importante que la tengas presente para saber qué criterios de evaluación debes considerar a la hora de realizar el reto.

















#/media/Archivo:Margaret_Hamilton_1995.jpg)













.jpg)