
Construcció d’una catapulta

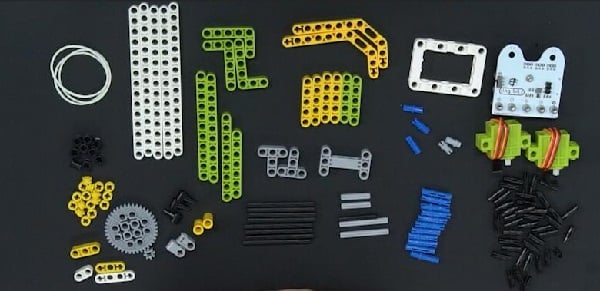
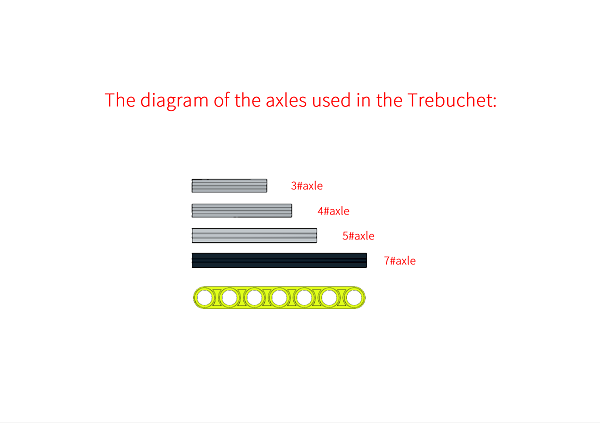
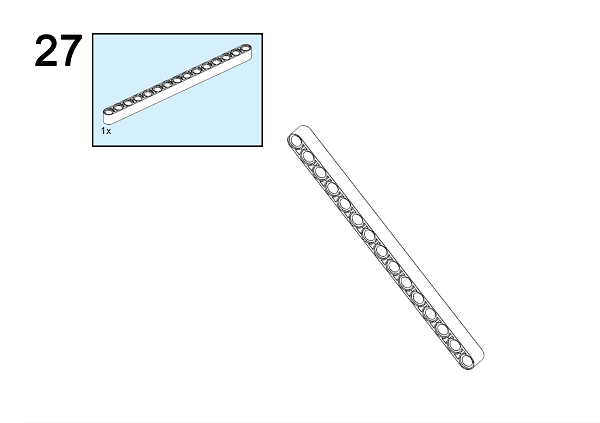
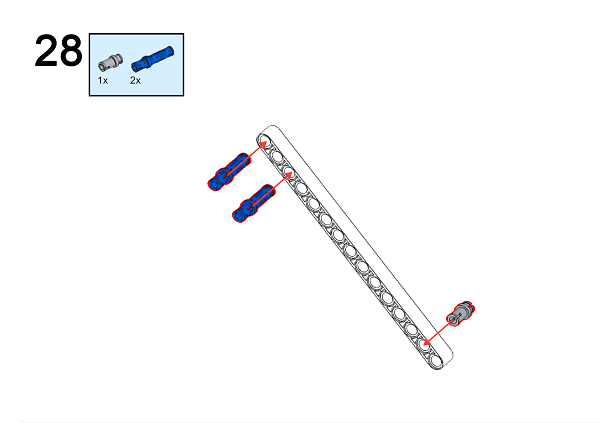
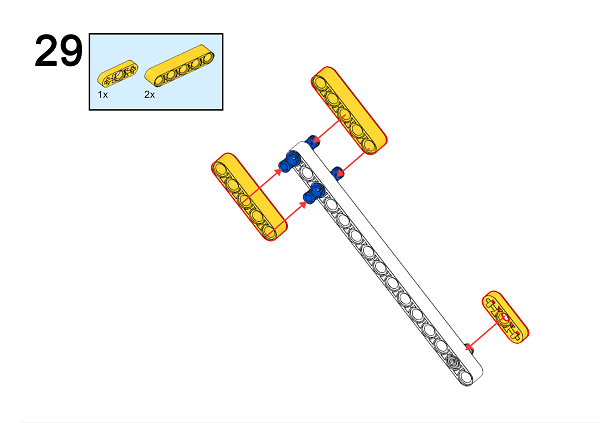
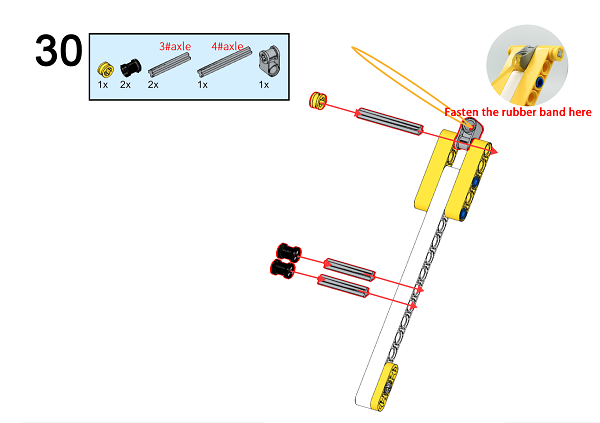
Materials
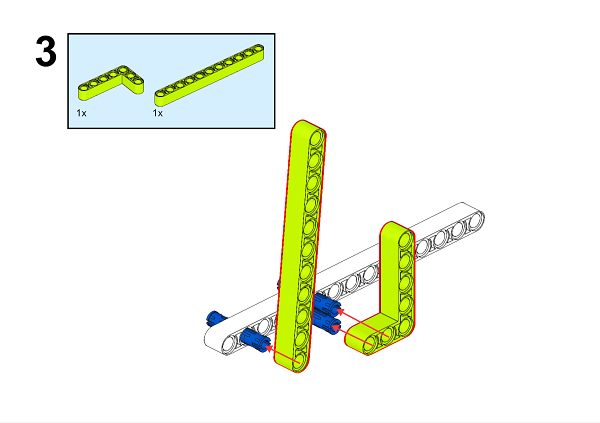
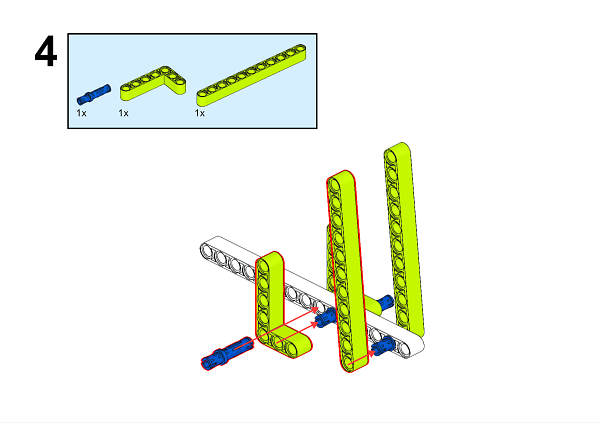
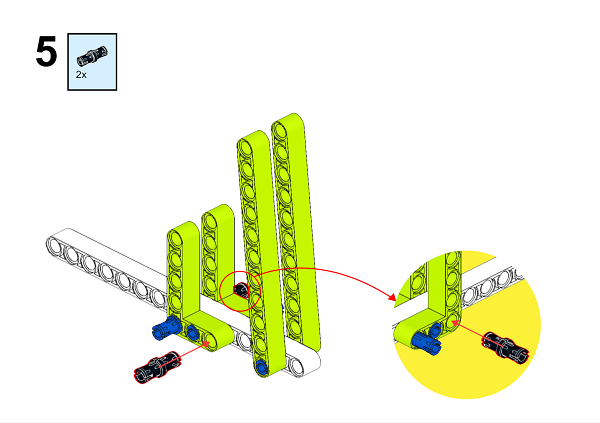
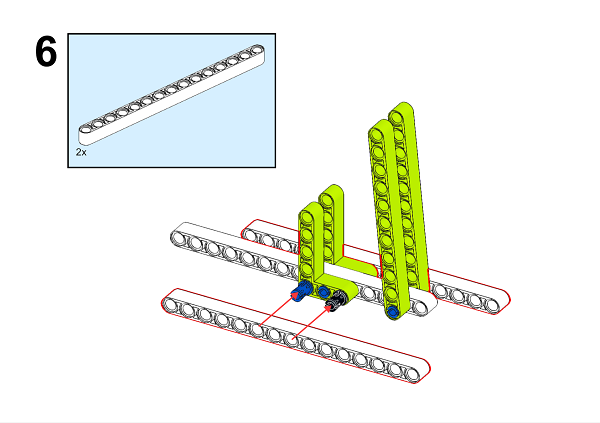
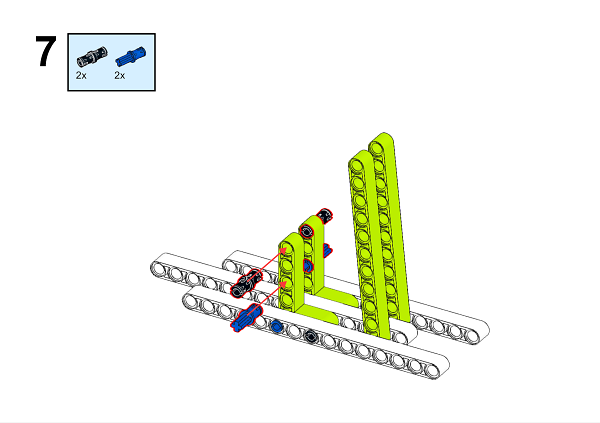
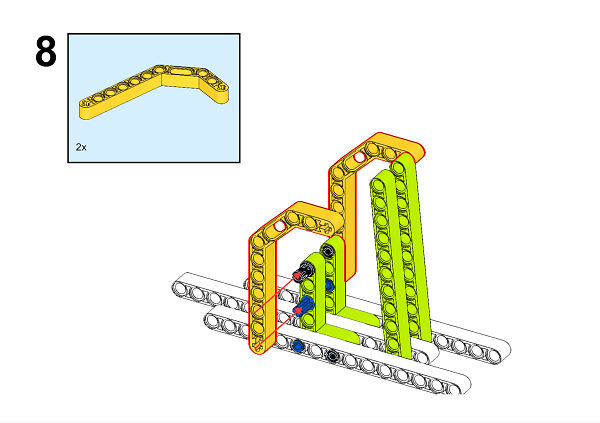
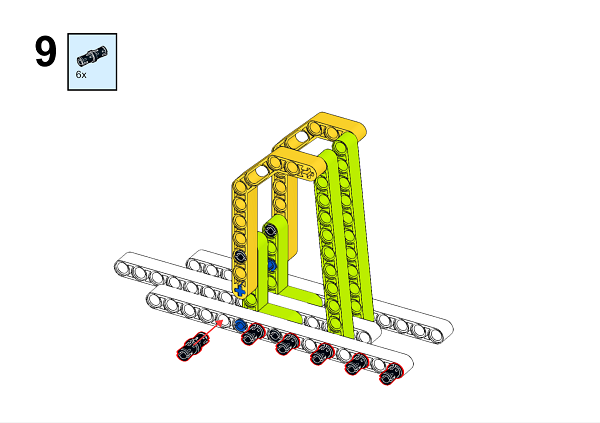
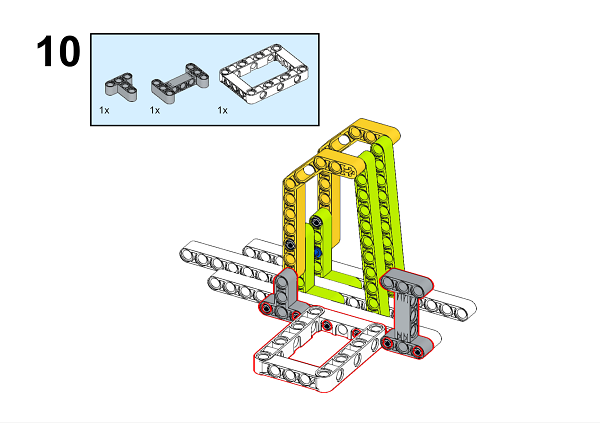
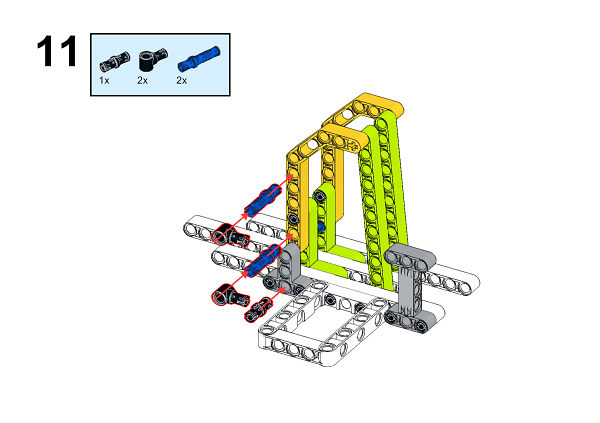
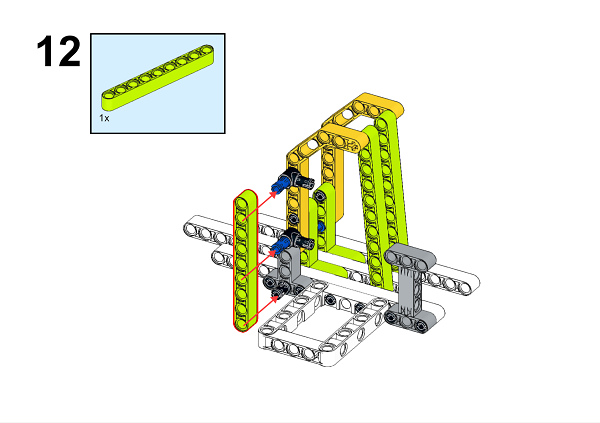
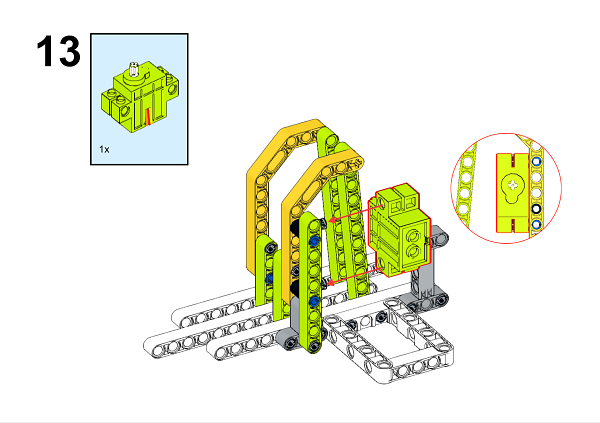
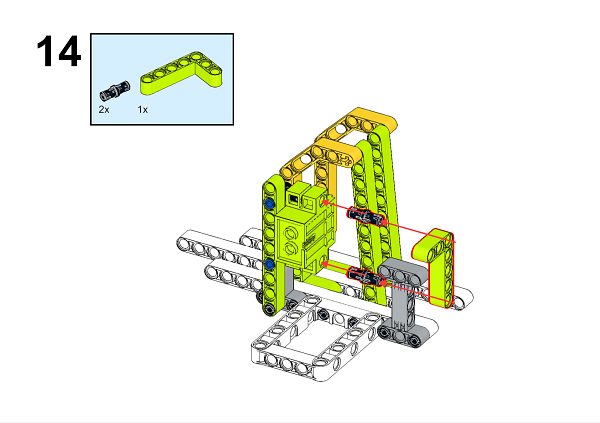
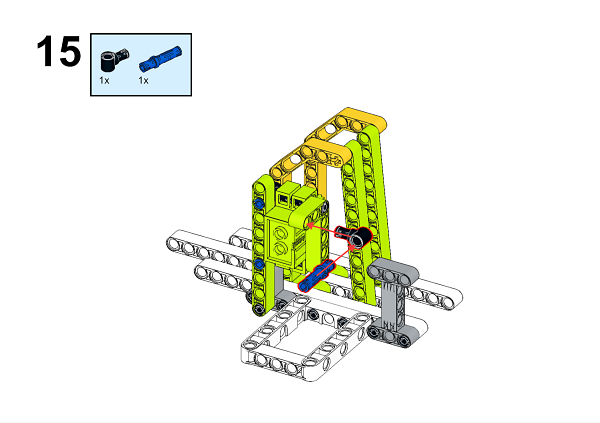
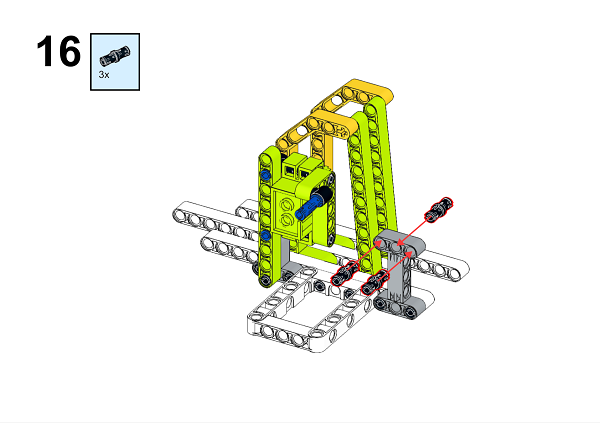
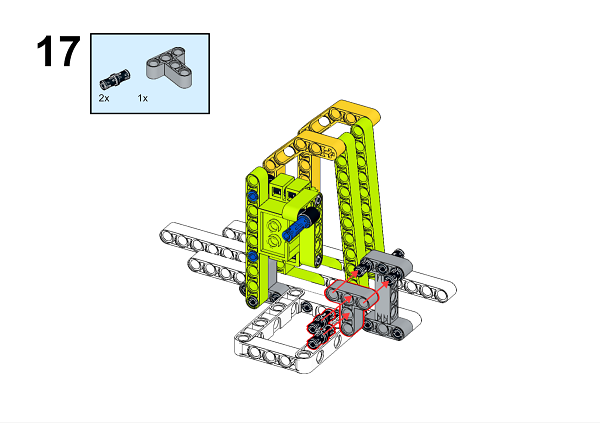
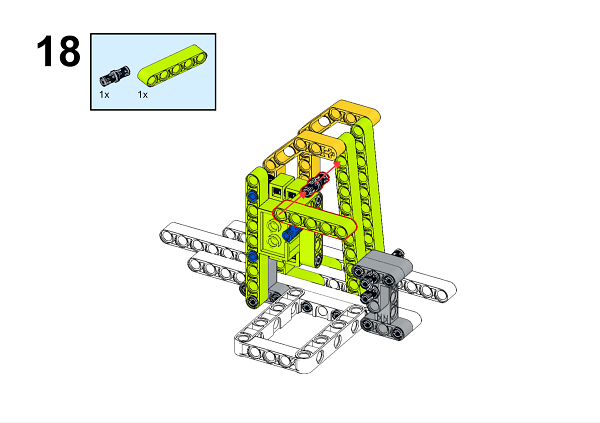
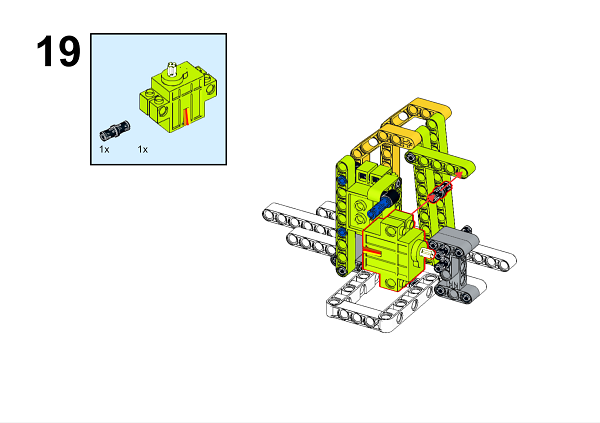
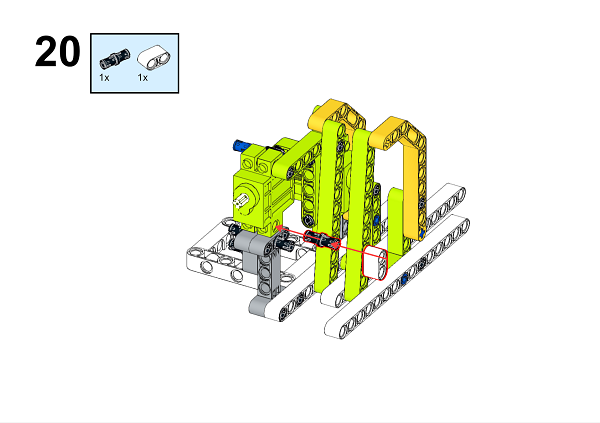
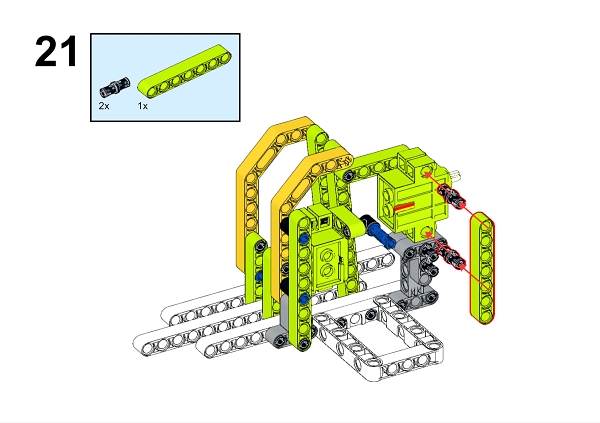
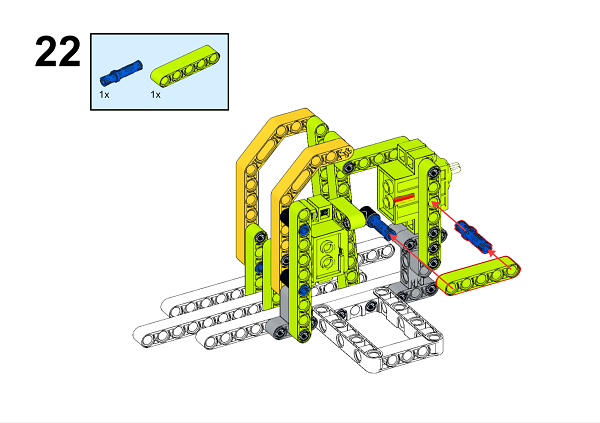
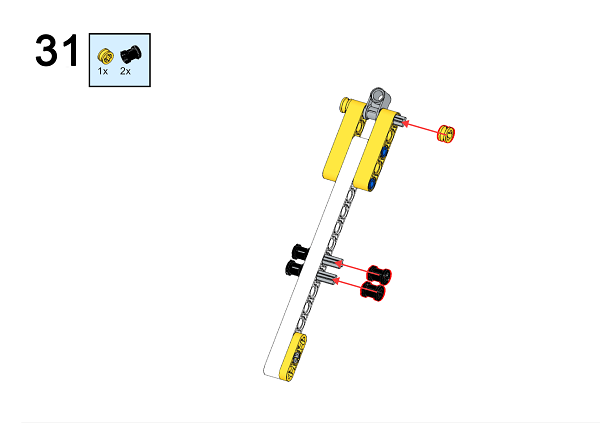
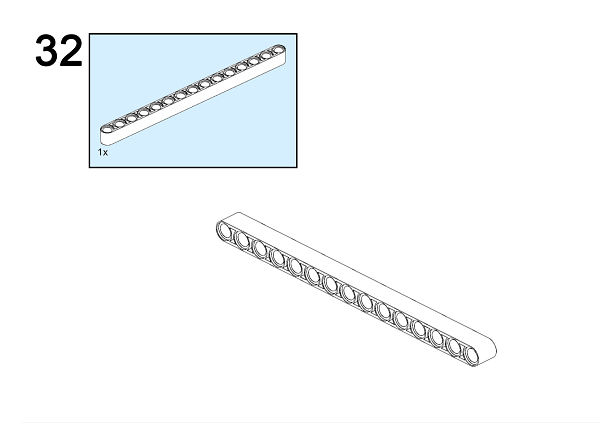
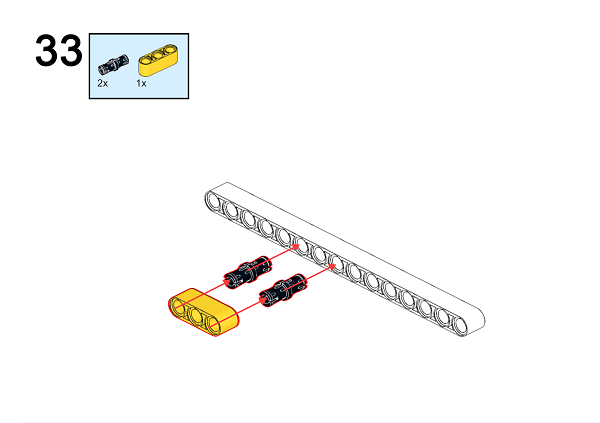
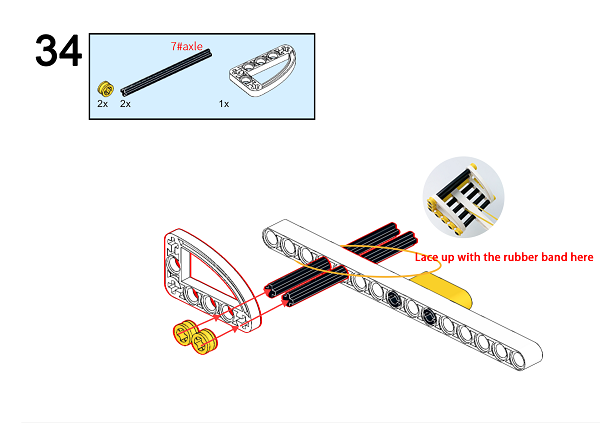
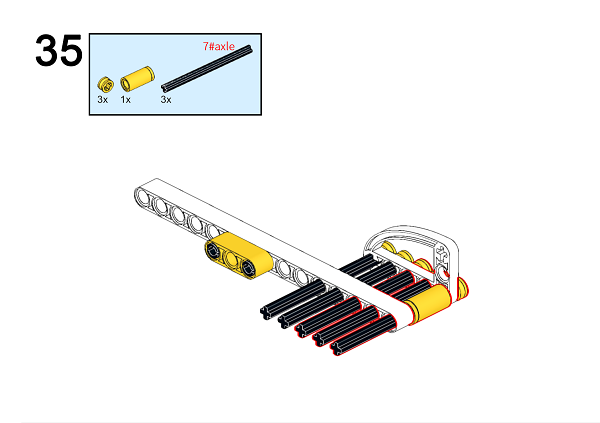
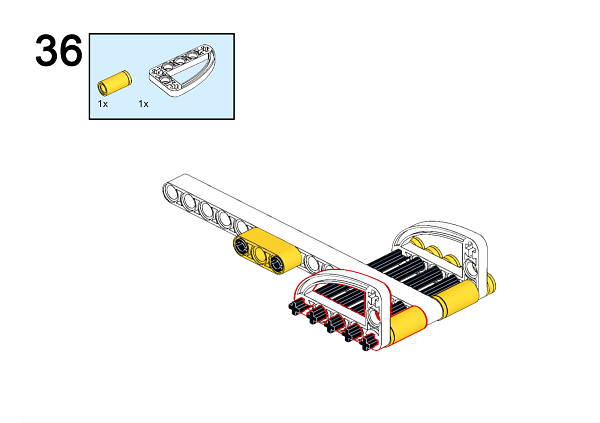
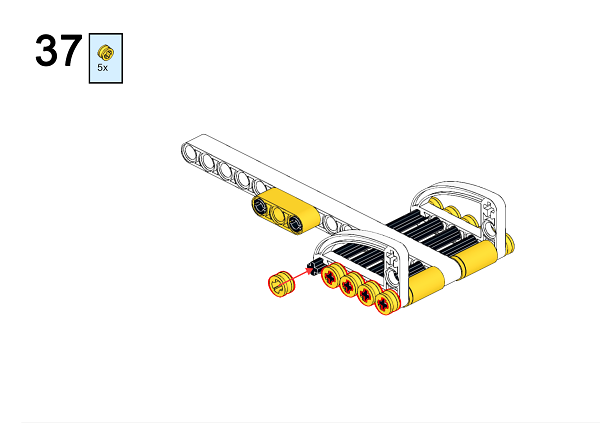
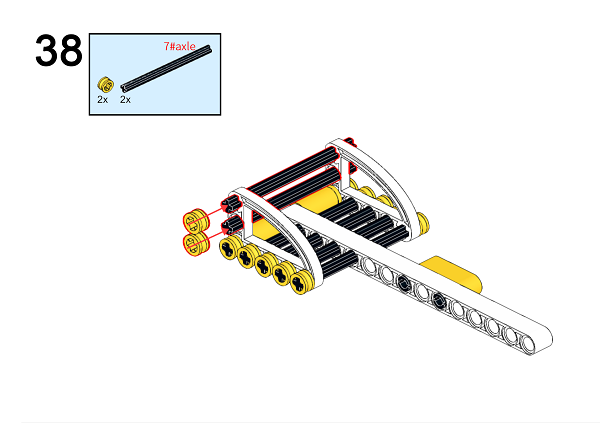
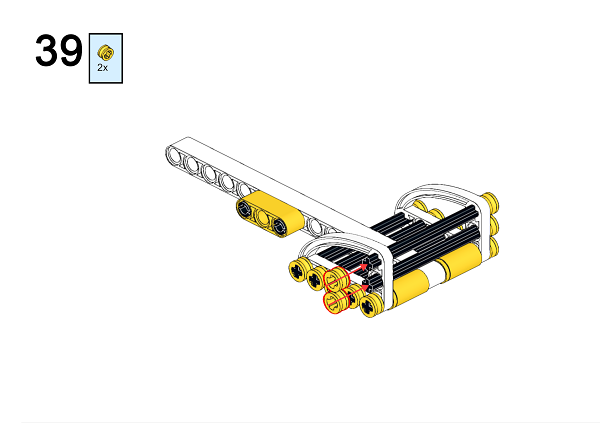
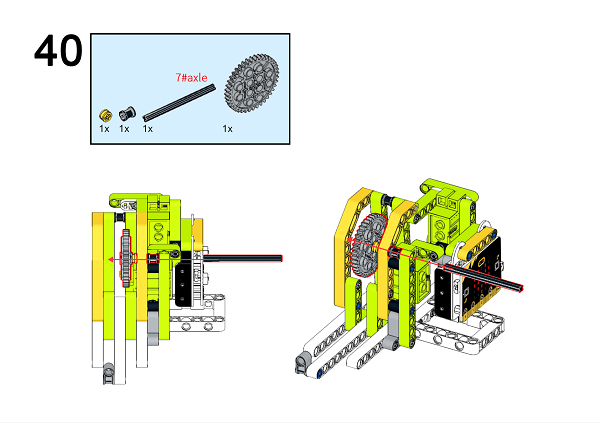
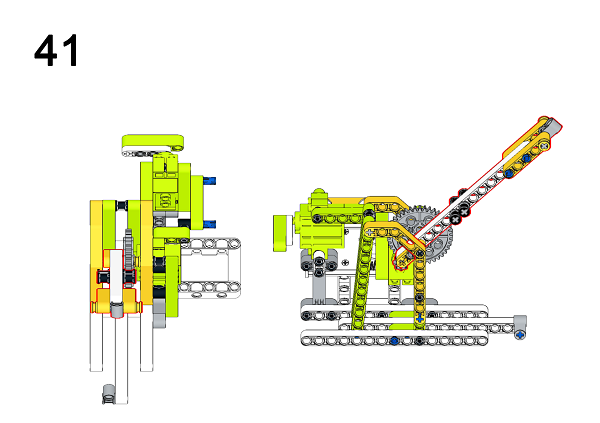
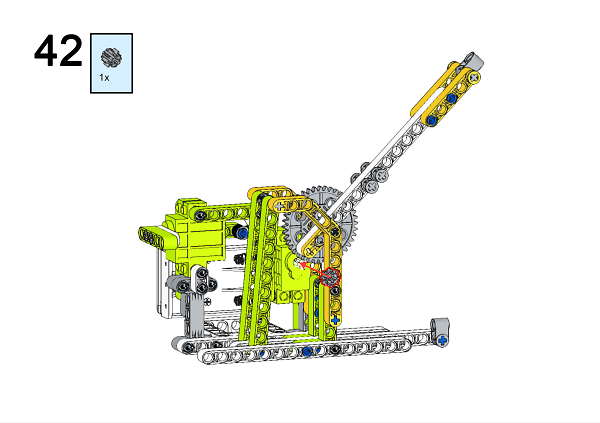
Construcció
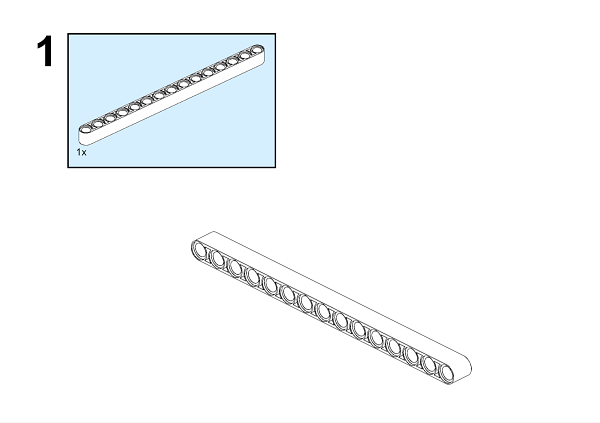
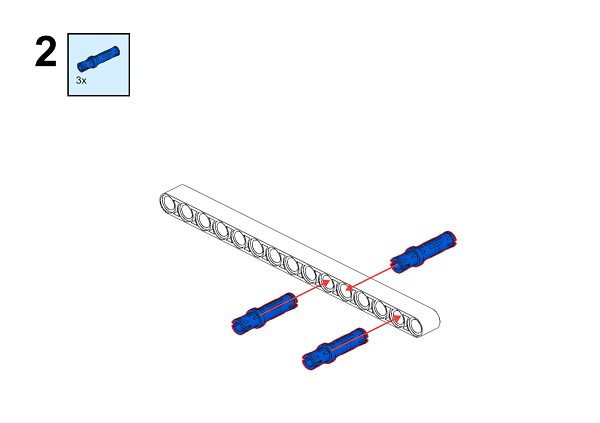
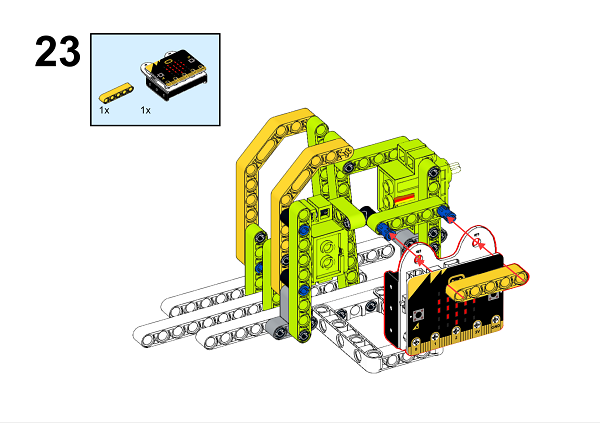
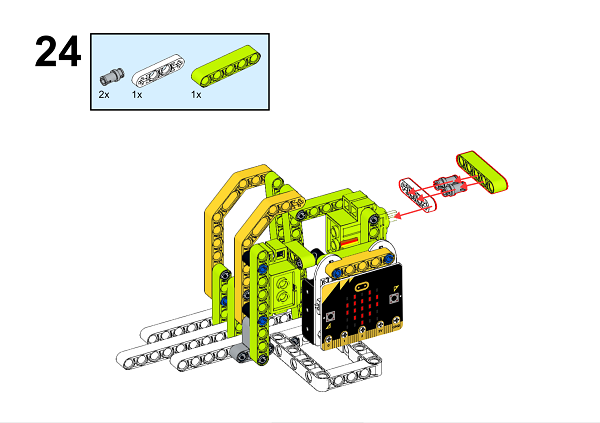
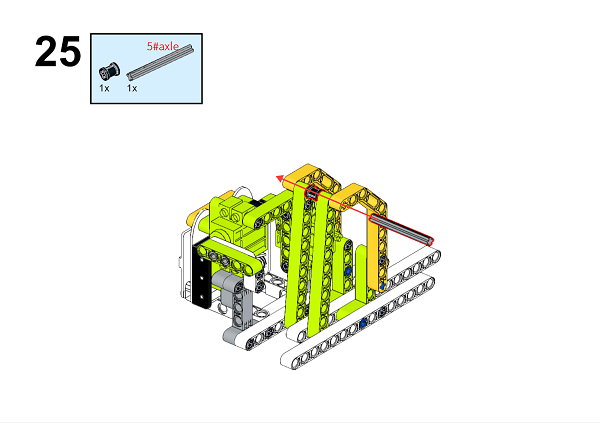
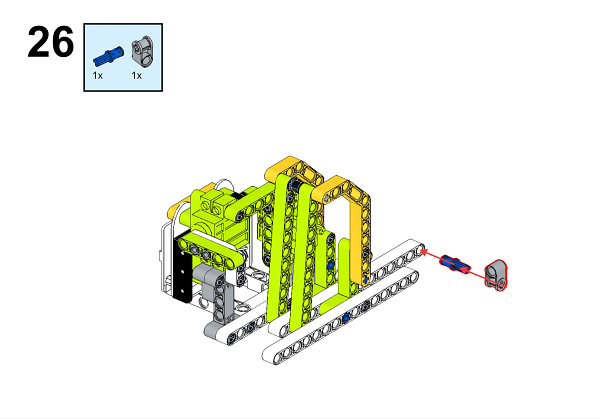
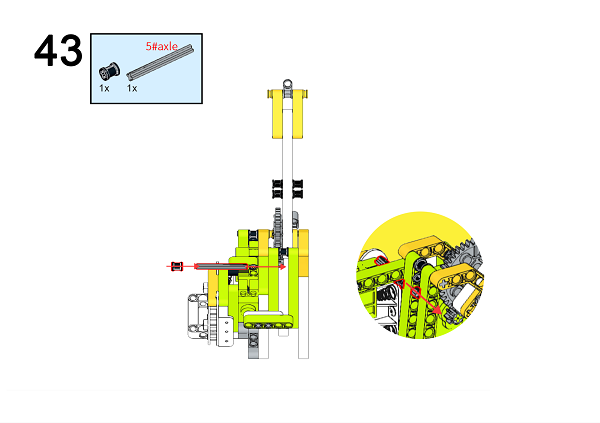
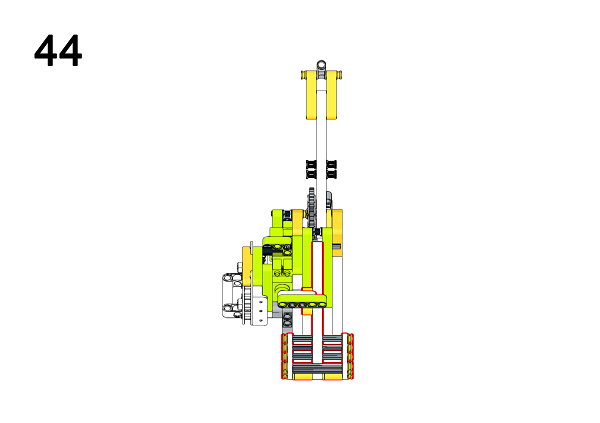
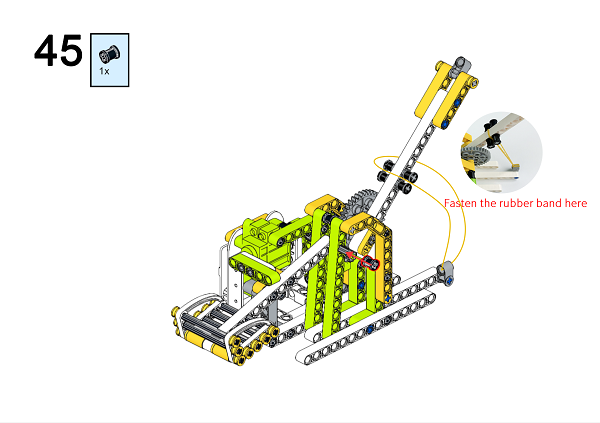
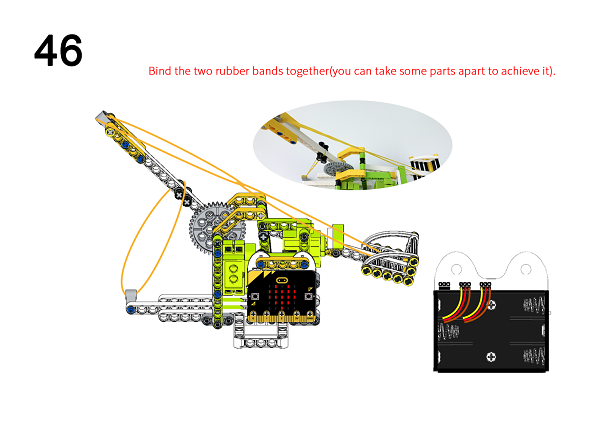

Podeu descarregar les instruccions detallades de muntatge del semàfor en aquest enllaç:Github download
Codi
Pas 1
Feu clic a “Advanced” al calaix de MakeCode per veure més opcions.
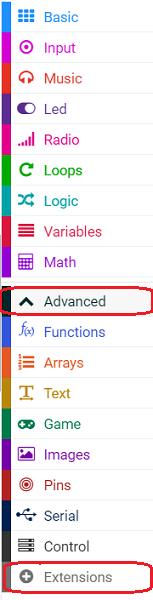
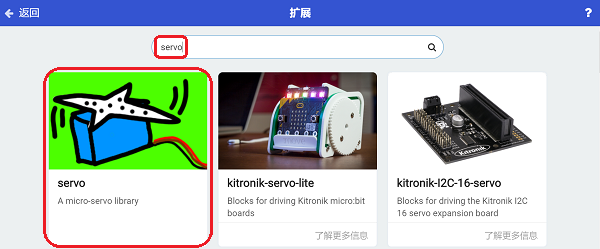
Per programar el ring: bit Bricks Pack, hem d’afegir una extensió. Feu clic a “Extensions” a la part inferior del calaix. Cerqueu “servo” al quadre de diàleg per baixar-la.
Pas 2
While button A being pressed, set the servo connected to P1 port turning 180 degrees and pause 300ms; then set the same port turning 90 degrees and pause 1000ms; set the servo connected to P2 turning 0 degree and pause 1000ms; then the same port turning 90 degrees and pause 1000ms; P1 turning 0 degree and pause 300ms; then the same port turning 90 degrees and pause 500ms; P2 turning 180 degrees and pause 1000ms and the same port turning 90 degrees and pause 1600ms.
Mentre s’està pressionant el botó A, ajusteu el servo connectat al pin P1 girant 180 graus i pauseu 300 ms; després, configureu el mateix pin girant 90 graus i pauseu 1000ms; configureu el servo connectat a P2 girant 0 graus i pauseu 1000 ms; el mateix pin gira 90 graus i fa una pausa de 1000 ms; P1 gira 0 graus i pausa 300ms; llavors el mateix pin gira 90 graus i fa una pausa de 500ms; P2 giran 180 graus i pausa 1000ms i el mateix pin giran 90 graus i pausa 1600ms.

Nota: com el servo que hem utilitzat es troba en 360 graus, l’extensió “servo” del MakeCode és adequada per servos en 180 graus, per tant, si es defineix l’angle de gir a 0 o 180 graus, el servo girarà en sentit horari o anti-rellotge. i 90 graus significa deixar de girar.
Codi
Enllaç https://makecode.microbit.org/_2xLKxDXKWCPX
També podeu descarregar-lo directament a continuació:
Resultat: quan es prem el botó A, la catapulta executa l’ordre de llançament i torna automàticament a l’estat inicial de llançament.