Mòdul 2 – Micro:BIT
- Llistat de materials usats.
-
- Aplicació web APP Inventor
- Aplicació mòbil APP Inventor ”MIT App Inventor 2”
- Mòbil
- Aplicació web Make Code
- Ordinador portàtil
- Placa Micro:Bit
- Cable connector USB a microUSB per la Micro:Bit
- Portapiles
- Motor (x2)
- Rodes (2)
- Roda posterior de plàstic
- Cables de connexió
- Piles
- Adaptador Kitronic per Micro:Bit
- Pistola de cola calenta
- Tubs de cola
- Tisores
- Cartró
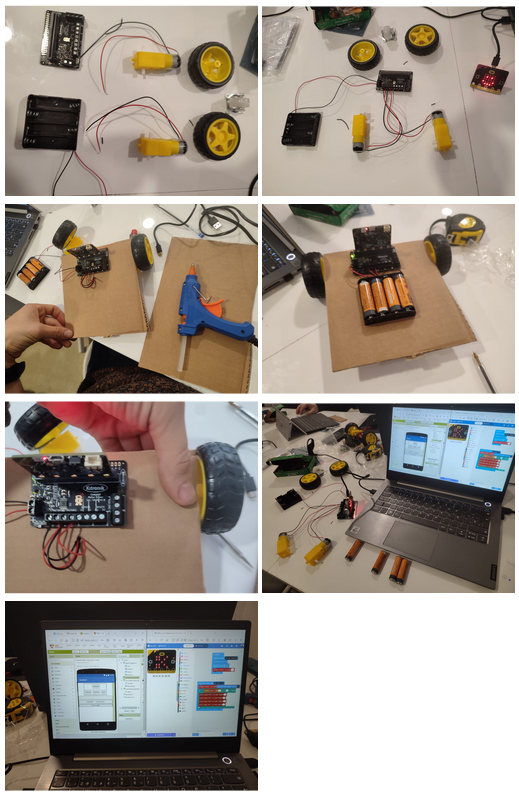
- Guia pas a pas del procés dut a terme per construir el dispositiu, complementat amb fotografies i/o vídeos, i mencionant qualsevol problema / solució que trobeu rellevant.
En les següents imatges es mostren els components utilitzats per crear el cotxe robòtic. La placa Micro:Bit s’alimenta amb una font d’energia mitjançant 4 piles AA en sèrie. També es connecta la Mircro:Bit a una placa adaptadora on podem connectar els positius i negatius de cada motor a les als pins corresponents com es mostra a la següent taula.
| Connexions Micro:Bit | |
| Motor 1 (+) | PIN 8 |
| Motor 1 (-) | PIN 12 |
| Motor 2 (+) | PIN 0 |
| Motor 2 (-) | PIN 16 |
| Font (+) d’alimentació | PIN Vcc |
| Font (-) d’alimentació | PIN GND |
- Codi resultant, així com una breu explicació de què fa i com funciona el programa.
– Cada punt correspon al número de la imatge del codi de programació corresponent.
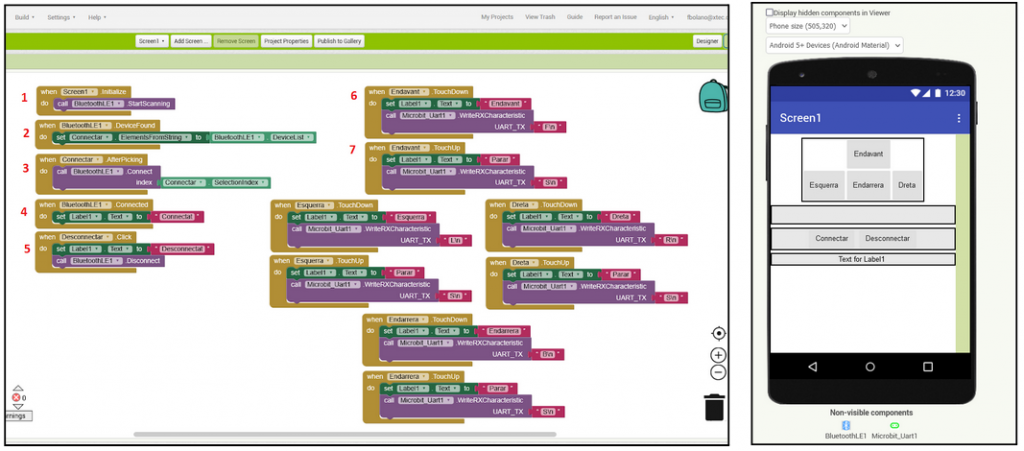
Programa APP Inventor
- Quan la pantalla principal s’analitza després de connectar l’App del mòbil amb el programa, activa el Bluetooth.
- Quan el Bluetooth està activat estableix la variable “Connectar” a la informació rebuda per Bluetooth.
- Quan es clica la tecla “Connectar”, envia un senyal amb la variable per connectar-ho.
- Quan el Bluetooth està connectat defineix la variable “Label1” a text i li assigna la paraula “Connectat”
- Quan es clica Desconnectar a la pantalla, s’assigna a la variable “Label1” el text “Desconnectat”, i desconnecta el Bluetooth.
L’estructura 6 i 7 es repeteix per les 4 instruccions de moviment del motor. Per girar a l’esquerra, a la dreta, anar endavant i endarrere.
- Quan es clica “Dreta”, s’assigna la paraula “Dreta” a la variable i a continuació s’envia a la placa MicroBit mitjançant Bluetooth la lletra “R” de “rigth” perquè en llegir-la la placa Micro:Bit pugui activar els motors per girar cap a la dreta.
- Quan es deix de prémer el botó “Dreta”, s’assigna a la variable “Level1” el text “Parar” i s’envia a la placa MicroBit mitjançant Bluetooth la lletra “S” de “stop” perquè pari de moure els motors.
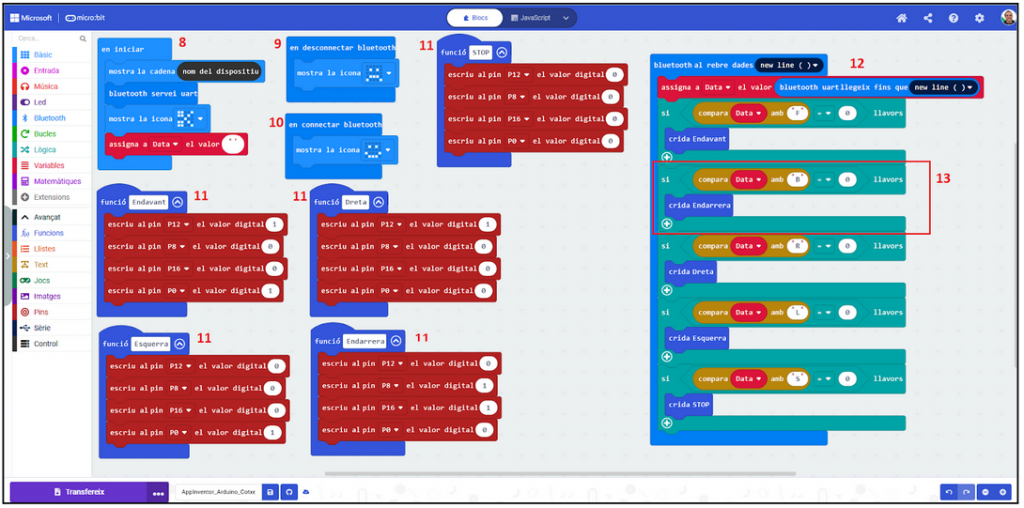
Programa Make Code Micro:Bit
- En iniciar la placa Micro:Bit:
- Imprimeix el número de sèrie de la placa per la pantalla per poder identificar quina placa és quan sincronitzem l’aplicació mòbil d’APP Inventor amb la placa Micro:Bit.
- Connecta el Bluetooth
- Mostra una icona del Bluetooth per la pantalla led
- Assigna a la variable Data amb format text, però sense cap text.
- Quan es desconnecta el Bluetooth imprimeix una cara trista a la pantalla de leds.
- Quan es connecta el Bluetooth imprimeix una cara somrient a la pantalla de leds.
- Estableix una funció i en cada una d’elles es fiquen les instruccions que han de seguir les sortides dels motors que estan connectades a diferents pins de la placa. Per exemple, la funció Dreta activa el PIN 1 que està connectat a la roda esquerra. A la funció dreta teníem dues opcions, o fer girar endavant la roda esquerra, o fer girar enrere la roda dreta. Hem triat la primera opció.
- En rebre dades de l’App de APP Inventor, fa un salt de línia i assigna a la variable “Data” de la lectura de la recepció mitjançant Bluetooth.
- Hi ha 5 estructures condicionals on és si es compleix la condició programada crida la funció corresponent. Per exemple: En la condició que crida la funció Dreta compara la informació que ha emmagatzemat la variable en rebre la informació de l’emissor mitjançant Bluetooth. Llavors si la informació rebuda és igual que “R” de “rigth” i fa girar el robot a la dreta.
- Vídeo on es vegi el vostre robot desplaçant-se i reaccionant a les peticions enviades des del vostre dispositiu mòbil.
Enllaç del vídeo del funcionament:
https://drive.google.com/file/d/1w37YZTJo7ENc2Gb6GVFvlX6K_4uEJ9p0/view?usp=sharing